病気やアクシデントなど色々あって約3か月ぶりの更新となります。
今回の記事はホンダ車でサーキットを走っている人以外には、ほぼ関係のない内容です(汗)
CBR1000RR-R、(2021~)CBR600RR、(2024~)CBR250RRなどのレースベース車を購入すると、HRC提供のツールを使って自分でECUセッティングが可能になります。
HRC製のツールは無料ですが、ツールを動かすためのPCと車両を繋ぐケーブルは別途必要になります。
PCを持ってる人は多いと思いますが、初めて使う人はケーブルを持っていないので購入する必要があります。
必要なケーブルは2つ
1.Kvaser Leaf Light HS v2(現在はv3になっています)
2.Sub-Harness, D-Sub Connector(CAN): 38900-NLT-010
これだけ揃えると自身でECUの書き換えができるようになるのですが、問題はケーブルの値段…
Kvaser Leaf Lightは7万円弱します。
中華コピー品もあるみたいですが、流石にちょっと不安なので正規品(v2)を買いました。

そしてSub-Harness, 38900-NLT-010は1万円弱します。
これも正規品を購入しました。
新品で揃えると2つで約8万円が飛んでいきます…
これだとこの記事は終了になってしまいますが、今回はSub-Harness, 38900-NLT-010を自作してみようという内容になります。
サブハーネスをテスターを使って調べたところ、配線に抵抗が入ってることもなく、単純にD-Sub9ピンとホンダの6ピンコネクタのうち3本が接続されているだけでした。
これってD-Sub9ピンコネクタとホンダ用6ピンコネクタが手に入れば自分で作れるんじゃ?ということで作ってみることに。

中華パーツを取り寄せ、テスターで調べた結果とデータシートなどに記載があるピンアサインに差異がないことを確認して結線しました。
9pin — 6pin
2 — 5 CAN_L
3 — 3 GND
7 — 2 CAN_H
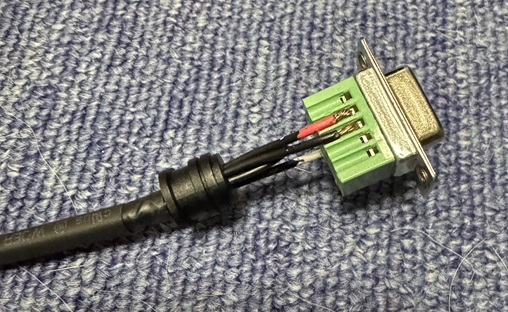
結線後にテスターを使って正しいピンアサインになっているかを確認してから使用します。
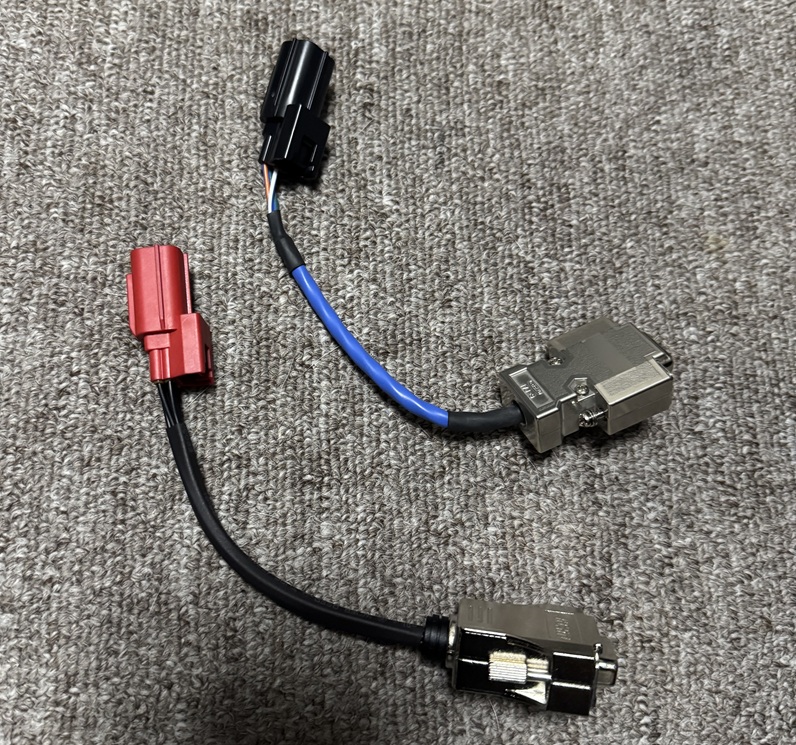
下の写真の上側がホンダ純正ケーブル
下側が自作ケーブルになります。
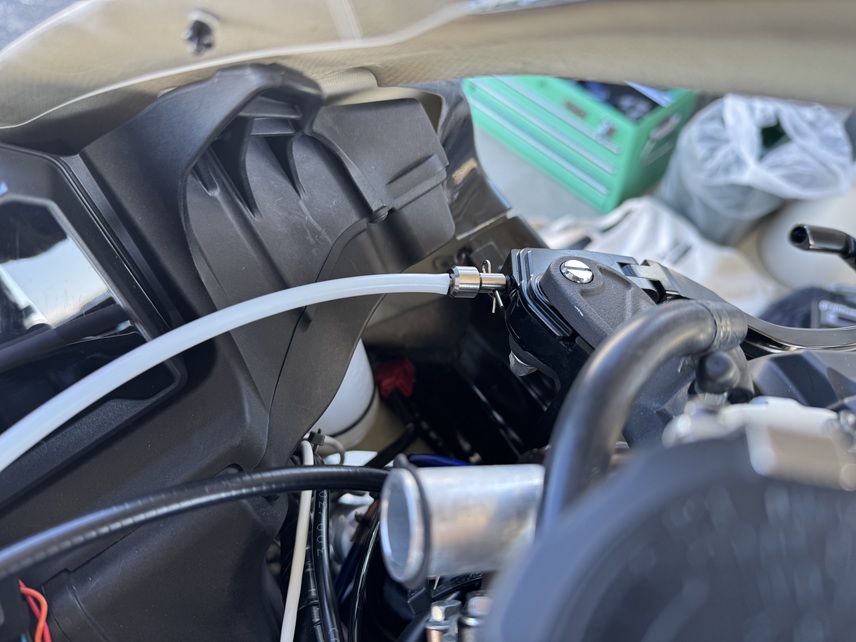
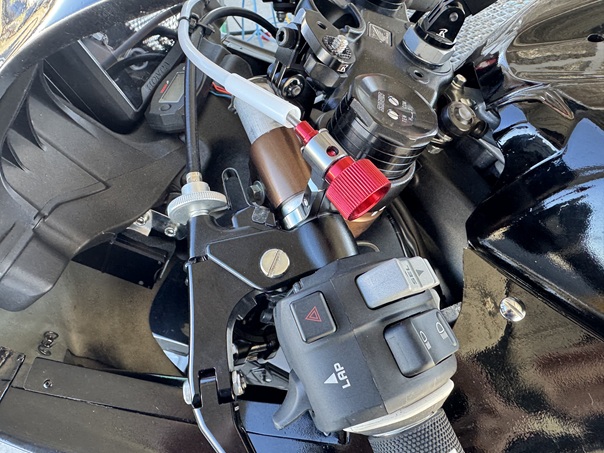
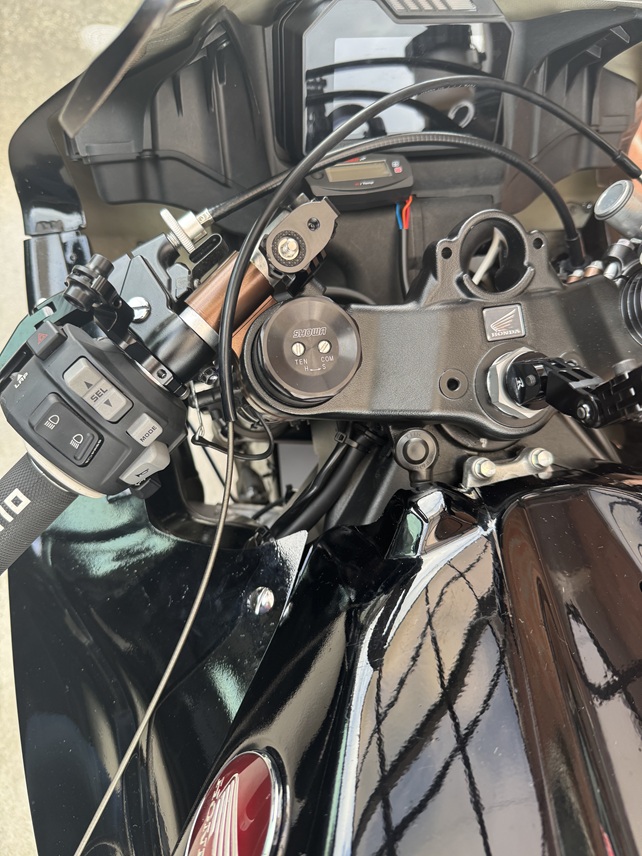
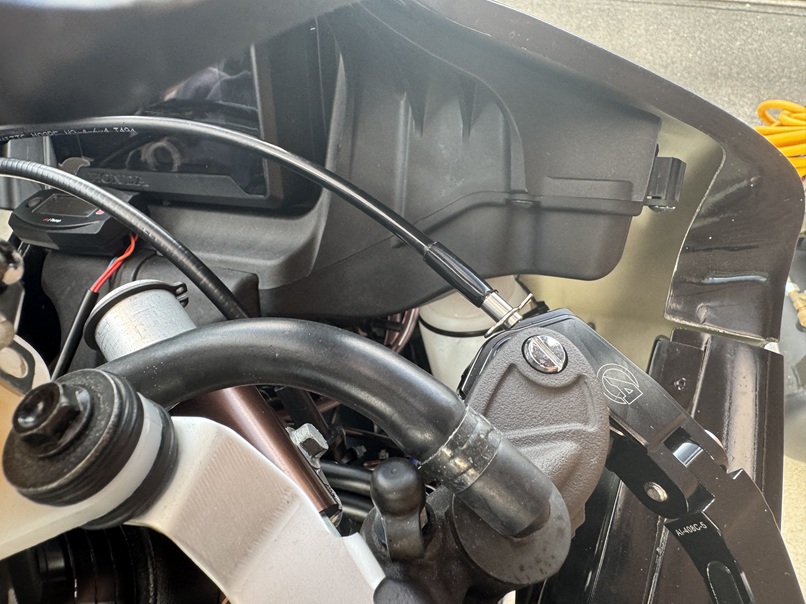
実際に車両に接続してみます!
自作ケーブルの車両側(6ピン)のコネクタの接続が若干渋い感じはありましたが、問題なく通信できてECUの読み書きができました。
自作だと1500円未満で1本作ることができます。
6ピンコネクタの接続がもう少し精度がよければいうことなしなので、作成前にいくつか購入して良さそうなものを選別すればよかったかなと思いました。
今年はHRC GROMも走らせるので、HRC GROM用のECU接続ハーネスも格安ケーブルで運用予定です。
こちらは既存製品を繋ぎ合わせるだけで動くと思ってますので、実際に通信できるのを確認したら公開予定です。