CBR600RR レースベースのデータロガーの続きです。
レースベース車両のハーネスにはユーザーが自由にセンサーを追加できるようにAD入力カプラが用意されています。
AD入力は0~5Vの入力を受け付け、入力されたデータはCANデータとして取り出すことが可能です。
HARC-PROのデータロガーでこのCAN信号を拾ってあげることでオプションセンサーのデータを可視化できます。
オプションセンサーにはサスペンションのストロークセンサーやブレーキの液圧センサーなどがありますが、自分で何らかのセンサーを追加することも可能です。
ちなみにHRC製のストロークセンサーは、1箇所約10万円します…
前後取り付ける場合、取り付けステーまで含めるて25万円くらいになります。
なかなかポンと出せる金額ではないので、自分でストロークセンサーを作ることにしました。
お金を掛けずに気軽に使いたいということで、赤外線を使った距離センサーを使うことにしました。
今回使ったのは「シャープ測距モジュール GP2Y0E02A (アナログ出力)」でモジュール1個が750円(税込)です。

長さが2cmもない小さなモジュールです。
モジュールへの供給電圧は2.7~3.3Vとなっており、AD入力カプラから出ているセンサー用の供給電圧12Vとはマッチしません。
モジュールから出力される信号は最高で2.8Vなので、ADカプラの入力値である0~5Vの範囲に収まるためそのまま使用可能です。
ということで、供給電圧だけ12Vを3.3Vに下げればいいので、電圧を降圧するDCDCレギュレーターを使用します。

使用するのはROHMの三端子DCDCレギュレーター 3.3V BP5293-33です。
価格は1個280円(税込)です。
この2つのパーツを組み合わせて供給電圧12V・0~2.8V出力の距離センサーモジュールの試作品を作ります。

センサーは防水ではないのでホットボンドで固めてます。
ホットボンドだと熱に弱いので、熱を持つものの近くに設置する場合だと熱に強いシーリング材などで防水処理した方がいいと思います。
試作した距離センサーモジュールがシャープのデータシート通りの値を出力するかテスターを使ってテストします。
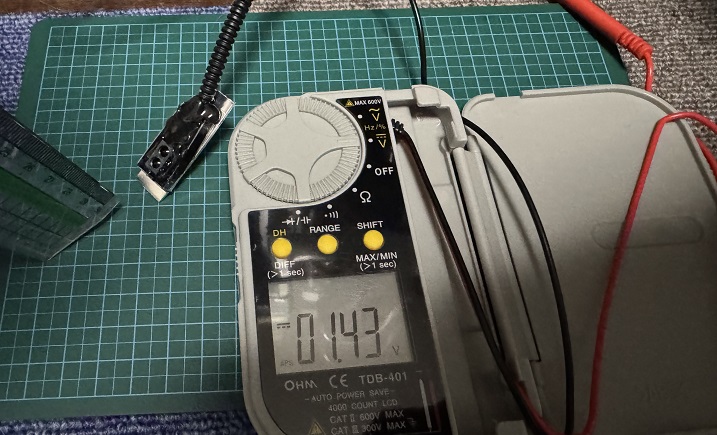
距離を変えて出力される電圧を計測します。
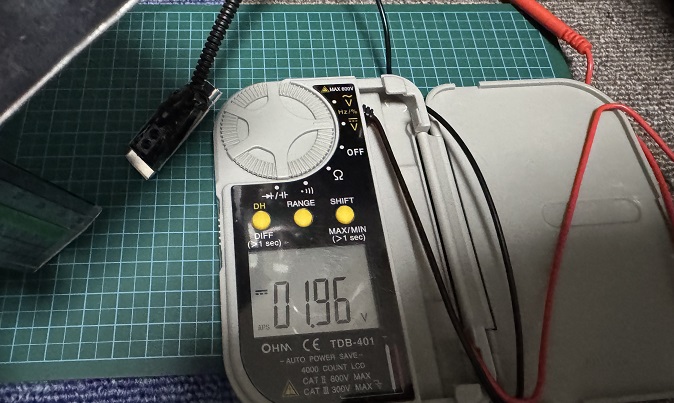
データシート通りの電圧が出ているので問題なさそうです。
センサーとしては問題なさそうなので前後用に2つセンサーを作成します。
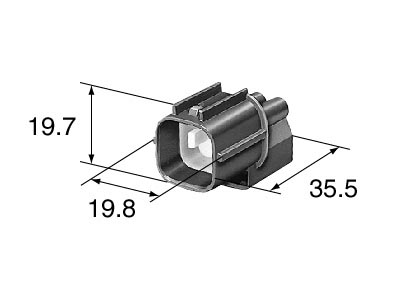
車両側のADコネクタと接続するためのコネクタは住友電装の6181-0072となります。
このコネクタは既に旧式扱いとなっているため、国内では手に入りにくい状態となっています。
自作したセンサーを車両に取り付けていきますが、このセンサーは赤外線を使用しているためセンサーの先に赤外線を反射できるものが必要となります。
今回使用するセンサーの場合、データシートによると反射する物体とセンサー間の距離は4cm~50cmである必要があります。
取り付け場所によって配線の長さも変わってくるため、最初に取り付ける場所のめぼしを付けておく必要があります。

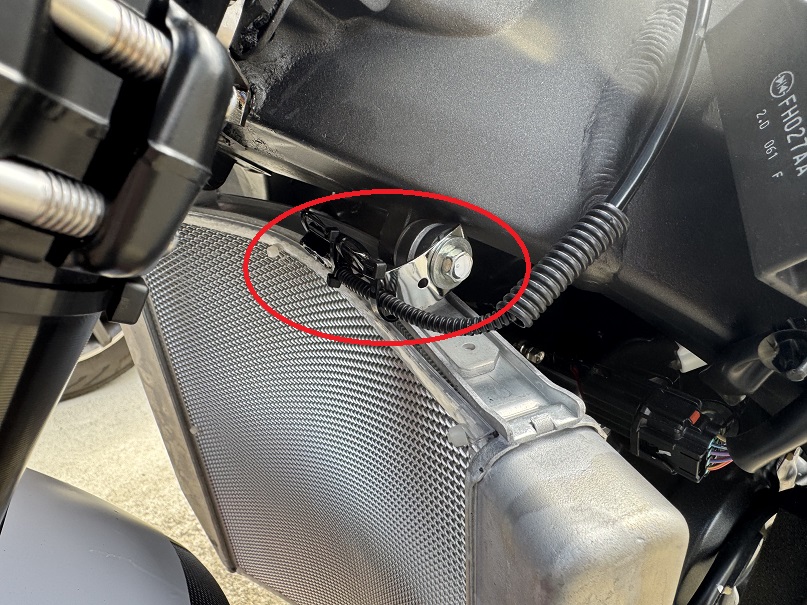
私のCBR600RRの場合だとステム周りの隙間が割と少なく、ラジエーターを止めているボルトにステーを共締めしてフロント用のストロークセンサーを取り付けることにしました。
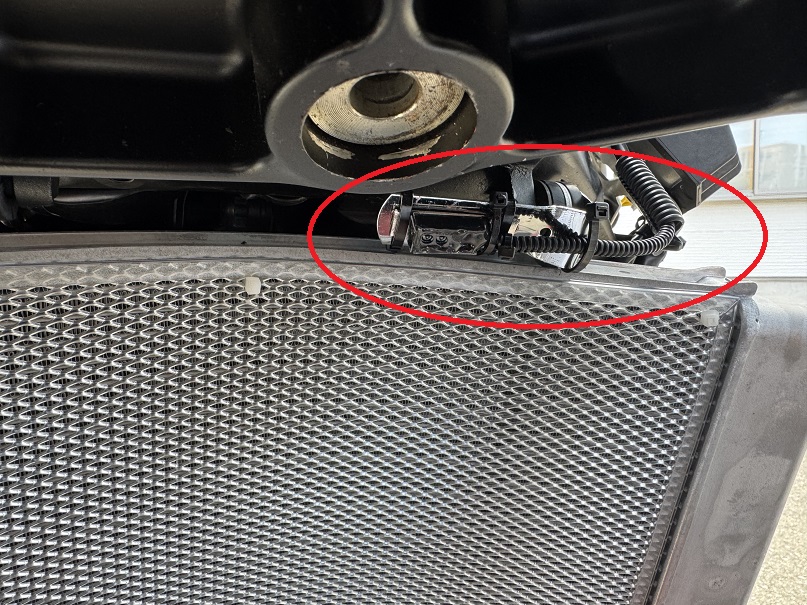
フロント用のADカプラはフロントのエアダクトのところにあるフロントカプラブーツ内にある白テープが貼られてない方(AD1)のカプラに接続します。

カプラとラジエータのボルトは逆側にあるので、上側に配線をグルっと這わせて反対側に持って行きました。

この時点で実際にロガーの電源を入れてちゃんとCANデータとして取得できるのかを試します。
HRCが出してる資料の「ロガー用CAN メッセージリスト一覧表」を見るとAUXAD1~4のFactor項目に「0.019531」と記載されているので、CANデータで取得した値にFactorの値を掛けることで0~5Vの値を取り出すことができます。
次に「測距モジュール GP2Y0E02A」のデータシートを確認します。
センサーから対象物が50cmの距離の時に0.55V、10cmで2.0V、4cmで2.2Vを出力と書かれています。
この数字だけ見てグラフにすると微妙に直線になりませんが、データシートのグラフ的には直線になっていると思われるため、50cmの時と4cmの時の電圧を使って2点を通る直線の方程式を出します。
y = -278.78787878788 * x + 653.33333333333
(割り切れないので切り捨ててます)
xに電圧を入れれば距離のyを導き出せます。
ちなみにこの式はcmではなくmmが出るようにしています。
また、xの電圧の部分は、上に書いたCANデータの数値にFactor値を掛けた値で取り出した数値を入れる必要があります。
尚、この方程式で出せるのはストローク量ではなくセンサーから対象物までの距離(mm)です。
実際にデータロガーで使用する場合は、センサーからの距離ではなくストローク量として出す式にしてあげる必要があります。
車両に取り付けたセンサーを実際に動かしてデータロガー上に数値を出してみると…
実際にノギスで測った距離とロガーに出てる数値が全く合わない(汗)
そして偶に数値が飛んだり計測不可になったり。
半日悩んで色々試した結果、センサーとの距離を測る対象物にしているフロントフェンダーの材質の反射がダメっぽい。
(後日やったリアフェンダーの反射もダメっぽかったけど、そっちは取り付け位置が悪かっただけかもしれない)
なので赤外線をしっかり反射できるように、非光沢な白色のカッティングシートを前後のフェンダーのセンサーがあたる部分に貼り付けました。

本当はセンサーがあたる部分だけでいいので、もっと小さい面積で構わないのですが、位置決めとか面倒だったので大きく切って貼り付けました。
これで試したら方程式を使ってロガーから出た距離と実測値が一致するようになって問題解決!
リア用のカプラー情報も書いておきます。
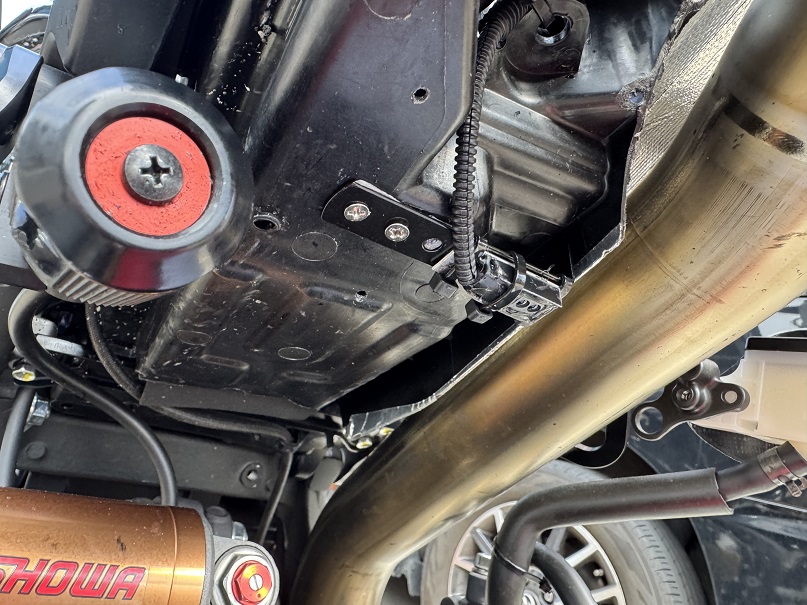
リア用のストロークセンサーはリアカプラブーツ内の灰色のカプラで白テープが貼られてないAD3のカプラに接続します。

ストロークセンサーはそこから下へとそのまま配線を這わせ、ステーを間に入れてリアの上部フェンダーにネジ止めしました。
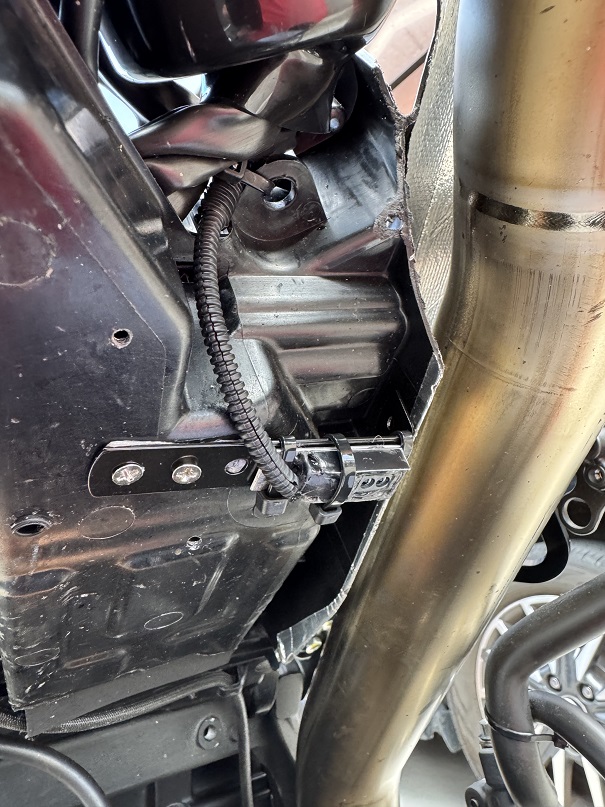
この辺りはマフラーの熱を結構受けるため、夏だとホットボンドはちょっと危ない気がします。
後ろのセンサーはインナーフェンダーを対象物としました。
CBR600RRの場合、リアサスのストロークはプロリンクを介しているのでかなり少ないはずですが、このセンサーではセンサーとフェンダー間の距離を測るため、実際のサスのストローク量よりも結構多くなると思います。
細かくやりたい人は、実際に計測して係数を調べることで近い値が取れると思いますが、私は面倒なのでそこまでやりません。
あくまでもセンサーと対象物との距離をストローク量としてデータ上で見ます。

もちろんリアのインナーフェンダーにも白のカッティングシートを貼りました。

データロガーソフトの計算式をストローク量が取れるように変更し、
前後共に実測値と同じストローク量がロガーで取れるようになったため、自作ストロークセンサーは無事に運用に漕ぎつけることができました。
ただ、赤外線センサーの性質上、雨の日は水滴が邪魔をして正しい値が取れない可能性が高いと思われます。
正確にストローク量を測りたい場合は、やはりHRC製のストロークセンサーを使用するのが間違いないと思います。
まあ、2千円くらいで1センサー作成できると思えば、性能的には十分ではないでしょうか。